Taking inspiration from human gait, Japanese researchers have combined lab-grown muscle tissue with artificial materials such as silicone rubber to create a bipedal robot that can walk and rotate. The method was recently published in the journal Matter, a Cell Press publication. The robot developed by a team of researchers at the University of Tokyo in Japan builds on previous bio-hybrid robots that utilized muscle tissue, which can already drive robots to crawl forward, swim in a straight line, and turn slowly, but not to turn sharply, and the ability to rotate and turn sharply is a trait necessary for robots to avoid obstacles.
Background
With the development of science and technology, robots are gradually becoming powerful assistants in people’s lives. To make robots better serve human beings, scientists are committed to making robots evolve to be more like human beings. In terms of appearance and language communication, researchers have achieved remarkable results. However, for robots to achieve more flexible movements, but also need to break through the drive technology challenges.
The University of Tokyo professor Takeuchi Shoji led a team of researchers, based on scientific and technological research, the combination of muscle tissue and synthetic materials, successfully produced a bipedal bio-hybrid robot. This robot can mimic human gait walking and sharp turns, bringing a breakthrough in the field of robotics.
Muscle Tissue-powered Bipedal Robot Launched
“This is a fusion of biology and mechanics, and research on bio-hybrid robots has recently attracted attention as a new field of robotics featuring biological functions.” Shoji Takeuchi of the University of Tokyo, Japan, corresponding author of the paper, said, “Using muscles as actuators allows us to build a compact robot with efficient, silent movement through soft touch.”
An innovative bipedal design, the team’s bipedal robot builds on the tradition of bio-hybrid robots that utilize muscles. Muscle tissue drives the bio-hybrid robot to walk and swim slowly forward, as well as to turn – but not sharply. However, the ability to rotate and make sharp turns is an essential feature for robots to avoid obstacles.
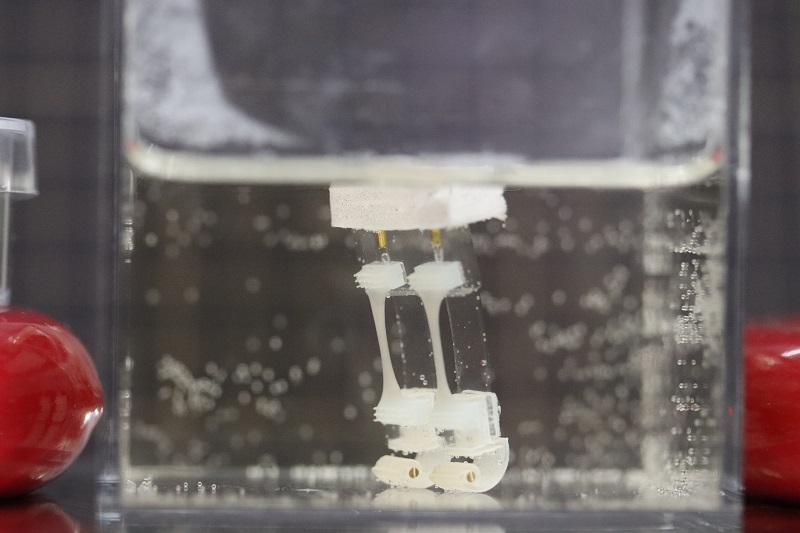
To create a more agile robot with fine, flexible movements, the researchers designed a bio-hybrid robot that mimics human gait and can operate in water. The robot has a foam buoy top and weighted legs to help it stand straight underwater. The robot’s skeleton is made mostly of silicone rubber, which can be bent and tensed to accommodate muscle movement.
The Silicone Material is Crucial
The robot’s skeleton is made primarily of silicone rubber, which can be bent and tensed to accommodate muscle movement. The researchers then attached lab-grown strips of skeletal muscle tissue to the silicone rubber and each leg. When the researchers stimulated the muscle tissue with an electric current, these muscles contracted, allowing the robot to lift its leg; when the current dissipated, its heel would move forward and land. By alternating electrical stimulation between the left and right legs every five seconds, the bio-hybrid robot managed to walk forward at a rate of 5.4 millimeters per minute. If the robot needed to make a turn, the researchers repeatedly shocked the right leg every five seconds while the left leg acted as an anchor, and the robot eventually made a 90-degree left turn in 62 seconds. The results of the study show that this muscle-driven bipedal robot can walk, stop, and make regular turns. The researchers say that using muscle actuation allows for a more compact robot and efficient, silent movement through soft touch. The team also plans to provide the bipedal robot with joints and thicker muscle tissue for more complex and powerful movements. “Currently, we are manually moving a pair of electrodes to apply an electric field to each leg, which takes time.” Takeuchi said, “In the future, by integrating electrodes into the robot, we hope to increase speed more efficiently.”
The team also plans to provide the bipedal robot with joints and thicker muscle tissue for more complex and powerful movements. But before upgrading the robot with more biological components, Takeuchi said, the team must integrate a nutrient supply system to maintain living tissues and device structures that will allow the robot to operate through uncertainty.
“At the regular lab meeting, we erupted in cheers when we saw the robot successfully walking in the video.” Takeuchi said, “While they may seem like a small step, they are, in fact, a giant leap forward for bio-hybrid robotics.”
Technological Innovations
Bio-hybrid robot: the robot is a fusion of biology and mechanics, featuring biological functions for efficient, silent movement.
Muscle tissue drive: the researchers attached strips of laboratory-grown skeletal muscle tissue to silicone rubber and two legs. Electrical stimulation of the muscle tissue enables the robot to walk and turn.
Mimicking human gait: The robot uses an innovative bipedal design to walk upright underwater. By controlling the contraction and relaxation of the muscles, the researchers enable the robot to achieve a human-like gait.
Flexible turns: The researchers enable the robot to make a 90-degree left turn by repeatedly tapping the right leg every 5 seconds while using the left leg as an anchor point.
Application Prospects
The introduction of this muscle tissue-driven bipedal robot will open up more possibilities in the field of service robotics. In hotels, hospitals, nursing homes, and other settings, this robot can provide more humanized services and enhance the user experience.
Future Challenges
Although this robot has made an important breakthrough, the following challenges need to be addressed to achieve widespread application:
Nutritional supply system: To maintain living tissues and device structures, researchers need to integrate a nutritional supply system for the robot.
Adaptation to airborne environments: Currently, this robot mainly operates underwater. In the future, researchers will need to optimize the design so that it can perform well in air.





{kind=link}